MARVIN

Human-Rover Interaction R&D
Most space exploration roadmaps state several phases of lunar exploration. In particular, these phases aim to use the Moon as a base for future deep-space missions. In that context, MARVIN is an R&D project from ESA preparing for some upcoming human presence on the Moon. MARVIN focuses on a scenario where humans are controlling a rover from various places, including:
- The Moon surface
- An orbiting space station
- A control room on Earth

A flexible technical architecture
EAC and ESOC working hand in hand
At its core, the MARVIN infrastructure is a flexible network, in which both EAC and ESOC are providing equipment through a VPN. We then voluntarily inject some network delays and disruptions to realistically simulate the conditions in which Earth and Moon may communicate. In particular, we use WENem (which uses the tc Linux command) over a delay tolerant network (Using the ION-DTN distribution). Furthermore, a realistic bandwidth constraint is observed, despite the use of multiple voice channels, video streams, telemetry, and telecommands.
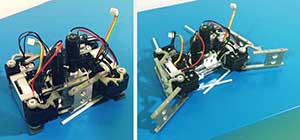
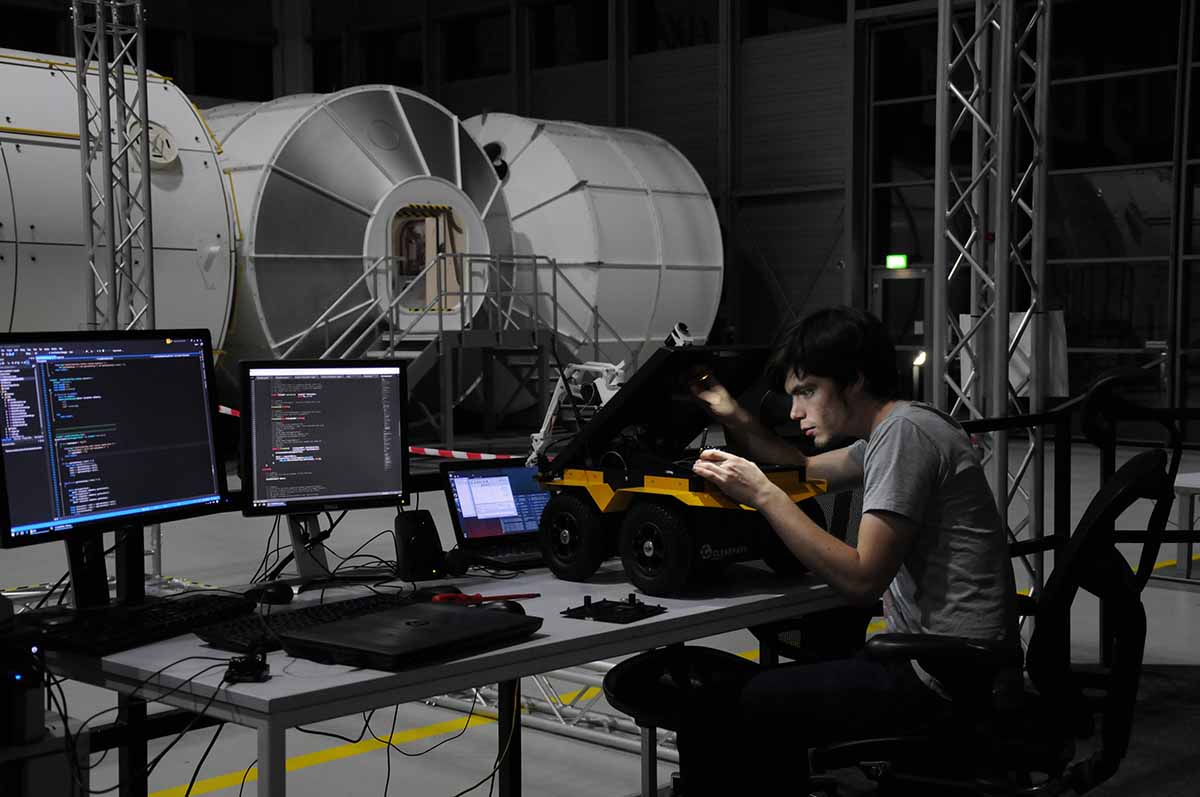
The Moon rover platform is the centerpiece of the MARVIN infrastructure. Therefore, I have led a significant effort to integrate a Jackal base from Clearpath robotics into the Mission Control System. My team and I implemented a wide variety of functionalities, like the available telecommands, the telemetry it sends, and their scheduling. Moreover, we have also incorporated five onboard cameras (including two articulated ones) and a robotic arm.

Improving the operational setup
Looking for the best way for rover and humand to work together
The MARVIN experiments focus on how humans interact with each other and with the rover during a planetary EVA. Each experiment is an iteration showcasing an improved operational setup providing increased mission efficiency and safety.
We enhance the operational setup in a few aspects. For instance, we vary the level of involvement of ground controllers on Earth, heeding the one-second delay for Moon communication. We also alter the role of all locations during a simulated mission. For example, the Moon orbiter crew can switch from monitoring the operations with a safety stop button to directly driving the rover. Likewise, the EVA crew on the Moon could be driving the rover until it has to perform geological sampling.
We also investigate new technologies. In particular, we examine the added value of moving the rover via voice-commands. More recently, we have also started to assess the increase in situational awareness that an Augmented Reality headset can provide.