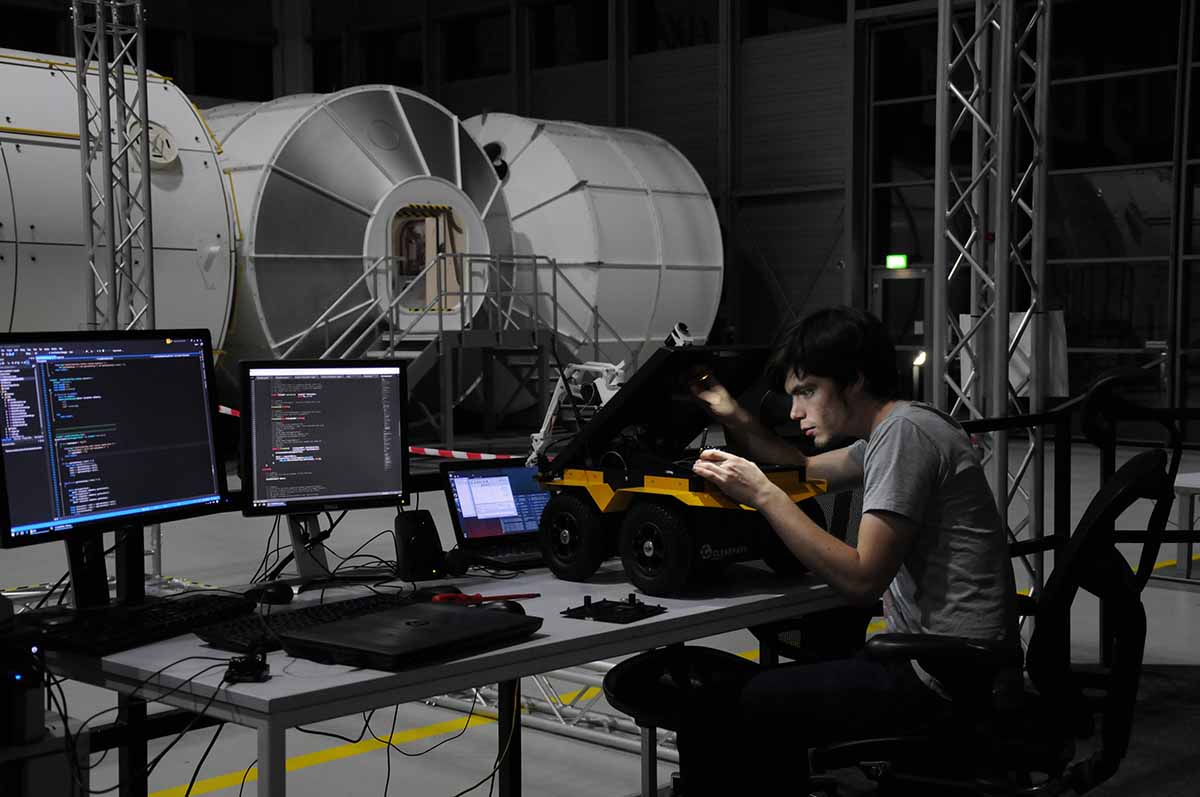
TechTheTroll

Eight months of mechanical design for the 2016 robot cup.
The robot is 35cm tall, but the center of mass is only 5cm high.
TechTheTroll is composed of two people: a friend doing the software side, and me. I'm responsible for the hardware from the wish list to the implementation. In order to offer tight integration, I conceived the robot in two passes. The first pass is a block-out focusing on putting the systems at their best location, while the second pass was the implementation towards ready-to-manufacture drawings.

I milled it at Supaero's DMSM.
Using hand-picked aluminium and steel alloys.
The DMSM department of Supaero offered me a certification for milling machine manipulation, and also provided access to what is basically the biggest fablab in France. Turning machines, 3D printers, composite fabrication, etc. It's all there and its personnel provided a lot of advice to help me have first class manufacturing.
The picture shown here is the milling of the outer part of a sliding mechanism for the encoding wheels, and I successfully got a precision of +/- 1/100th of millimeter !

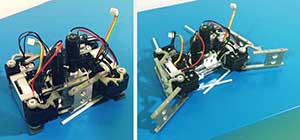
Extensible electronics.
14 analogic inputs and on-board control panel
The circuit board I have made is responsible for power distribution from Li-Po batteries to the CC motors using H bridges and receiving the ARM board shielded on top of it. I had the basic mechanical block-out done in advance, and it provided very specific elsctronics requirements. This workflow led to that particular shape of the circuit board.
The on-board computational power is split in two. First, the ARM cortex M4 shield handles the locomotion and the motion of all actuators. Second, a raspberry pi on the flank of the robot, which handles the AI made by a friend.